Imposibilidad de reducir a un post las teorías existentes sobre seguridad vial
Cuando nos planteamos escribir un post sobre las teorías y los modelos que existen para comprender la seguridad vial e intentar prevenir los siniestros viales[1], fuimos conscientes en todo momento de la cantidad extensísima de material que hay y de la imposibilidad de resumirlo en un artículo. De hecho, existen diversas tesis doctorales y libros al respecto, por lo que aclaramos que nuestra intención es solo dar una pincelada sobre algunos de los modelos de investigación y metodologías de análisis en vigor.
Contextualización del momento presente: ¿cuál es el paradigma de la seguridad vial en el S. XXI?
El pensamiento y las concepciones sobre la seguridad vial han ido evolucionando a lo largo del s. XX, para desembocar en la actualidad en un paradigma que la incluye dentro de un sistema de movilidad global y complejo.
En los primeros paradigmas (hasta principios de los 60) la seguridad vial ponía el foco en la ingeniería de los automóviles y de las carreteras, para evolucionar poco a poco hacia un paradigma de control (años 60-mediados de los 80), que centraba sus esfuerzos en controlar el comportamiento de los conductores y de los usuarios de la vía. Desde mediados de los 80 y hasta nuestros días, se ha ido imponiendo progresivamente un paradigma de carácter global centrado en la prevención, que además de englobar los vehículos, las infraestructuras y los conductores, contempla la movilidad y el tráfico como un sistema complejo y circular que ha de estudiarse de forma holística.
Evidentemente, el cambio de paradigma no ha hecho que se dejen de lado las concepciones anteriores, de las que beben todavía algunos modelos teóricos y métodos de investigación que se siguen aplicando.
Algunos modelos conceptuales vigentes en la actualidad
Modelos secuenciales
Se trata de un modelo de investigación habitualmente designado con las siglas MOSES, que entienden que el siniestro vial es el resultado de una secuencia de hechos que se han desencadenado en un orden concreto y que guardan de forma secuencial una relación de causa-efecto. Para este modelo, el accidente de tráfico es la consecuencia de varios factores desencadenantes entrelazados de forma lineal, donde cada factor aporta un valor necesario para llegar al siniestro como resultado final. Por tanto, se centra la atención en los actos y contexto inmediatamente anteriores al siniestro o presentes durante el mismo, con el objetivo principal de esclarecer cuál fue la causa raíz que activó la cadena de componentes que acabaron en accidente.
La principal fortaleza de estos modelos es la capacidad que tienen para responder a la pregunta “¿cómo pasó?”, por lo que ya podéis intuir que los trabajos desarrollados en la reconstrucción de accidentes de tráfico parten de estudios, patrones de análisis y fórmulas que se engloban habitualmente en este marco. Se trata de aglutinar en un solo análisis secuencial, “las acciones y las condiciones que han generado la correlación de eventos que han desembocado en un impacto entre dos cuerpos con consecuencias lesivas para las personas y dañinas para las cosas. Se trata de una aproximación multidisciplinar a la materia, pero no de una forma meramente superpuesta, sino de una forma integrada para conseguir de forma científica responder a la pregunta sobre cómo sucedieron los hechos y por qué” (CAMPÓN, 2009).
Modelo de Stannard Baker
Aunque existen diversos modelos que se enmarcan en esta tipología, el más extendido es el del ingeniero J. S. Baker, profesor del Instituto de Tráfico de la Northwestern University de Estados Unidos. Este autor expuso un modelo específicamente concebido para la conceptualización y análisis de los accidentes de tráfico, que se centra en el eje HVE (Human-Vehicle-Environement/ Humano-Vehículo-Ambiente) y que entiende que son más importantes las interdependencias entre los 3 elementos que las estructuras formales de los mismos. Una de las fortalezas de este modelo es su capacidad de incluir las variables vinculadas con el factor humano (percepción, reacción y decisión del conductor) y ponerlas en relación con la mecánica, cinemática y dinámica de los vehículos en contextos ambientales y jurídicos concretos.
Algunos de los aspectos más conocidos y relevantes de este modelo, son:
- Señalar 3 fases de desarrollo en el siniestro vial al poner el foco en el factor humano: fase de percepción, fase de decisión y fase de conflicto
- Señalar los puntos espaciales a considerar en un accidente de tráfico: punto de percepción posible, punto de percepción real, punto de decisión, punto de conflicto, punto de impacto y posición final.
- Demostrar una elevada utilidad práctica para reconstruir y explicar el desarrollo de los siniestros de tráfico de forma rigurosa y objetiva.
- Haber introducido en el campo de la seguridad vial el concepto “conflicto” como situación o peligro inminente anterior al siniestro.
Este modelo, con algunas adaptaciones, es el utilizado en España en los siniestros reconstruidos por la Guardia Civil.
Modelos epidemiológicos
Para este tipo de modelos, también llamados organizacionales o de salud pública, el siniestro vial todavía es entendido como una secuencia de eventos, aunque desde una concepción más amplia. Este modelo establece una analogía con los conceptos desarrollados por las ciencias médicas para explicar la propagación de enfermedades, lo que se traduce en poner el foco, no solo en la causalidad del siniestro, sino también en las fallas latentes y en considerar más de una taxonomía de causas como posibilidad desencadenante de los siniestros.
Las fallas latentes son aquellas que ya existen antes de que se produzca un hecho adverso, las cuales pasan totalmente desapercibidas hasta que una falla activa las dispara. Partiendo de esta base, el modelo considera que las causas más relevantes para los siniestros viales son las fallas latentes, que pueden prevenirse.
Hasta que aparecieron estos modelos se analizaba por separado el comportamiento del conductor o usuario de la vía, el vehículo y el entorno vial, mientras que el modelo epidemiológico tiene en cuenta la interacción entre todos estos elementos para analizar los riesgos de la seguridad vial. Enfocarse en las fallas latentes permite identificar los factores de riesgo y, en consecuencia, favorece una sistematización de las medidas preventivas a adoptar.
El modelo clínico matricial de Haddon
De todos los modelos epidemiológicos existentes, el de Haddon es el más conocido y el que más repercusión ha tenido. El punto de partida del autor es un modelo de transferencia de energía. Para el autor de este modelo la energía cinética es el agente patógeno y el vehículo es el vector transmisor. La energía cinética transferida a las víctimas mediante el vector transmisor es la que genera las lesiones en los accidentes de tráfico. Así, la lesión se produce cuando la energía cinética generada por el movimiento del vehículo se transfiere a un individuo en cantidades que la estructura del cuerpo humano no puede tolerar.
Para Haddon el sistema vial está mal diseñado y el eslabón más débil que sufre las consecuencias cuando los accidentes se producen es el cuerpo humano. La finalidad de su modelo es actuar sobre las fallas latentes para prevenir estos incidentes.
La matriz de Haddon se ha convertido en una herramienta metodológica muy utilizada para planificar la prevención de accidentes, la cual se centra en 3 niveles de prevención:
- La prevención primaria: enfocada en evitar que el siniestro ocurra
- La prevención secundaria: enfocada en minimizar las consecuencias cuando el siniestro tiene lugar
- La prevención terciaria: enfocada en conservar la vida después del siniestro

En los 80 Haddon rediseñó su matriz para diferenciar entre ambiente físico (el escenario donde ocurre el siniestro) y social (el marco social, legal y cultural); lo cual sería ampliado años más tarde por Runyan (2003), que introdujo como tercera dimensión los criterios de decisión (efectividad, costo económico, libertad, equidad, estigmatización, preferencias, factibilidad…).
La utilidad práctica del modelo de Haddon se basa en:
- facilitar la ordenación de la información recogida para analizarla e intentar prevenir el problema
- permitir identificar los riesgos y diseñar las intervenciones que los neutralizan o reducen
- proporcionar pautas para identificar las oportunidades de intervención en materia de seguridad vial
Aunque también tiene algunas flaquezas, es un modelo que ha demostrado su eficacia en la reducción de la siniestralidad cuando se ha tomado como referencia en las acciones de prevención desarrolladas en Europa, Estados Unidos y Australia.
Modelos del factor humano
Se trata de modelos que tienen su origen en la psicología, los cuales conciben el accidente de tráfico como el resultado de errores o carencias humanas que confluyen con otras condiciones referidas a los vehículos y al entorno vial.
Estos modelos pueden subdividirse en los siguientes “submodelos”:
Modelos de habilidades
Son modelos que ven la conducción como el resultado de un conjunto de habilidades susceptibles de ser medidas y cuantificadas, los cuales entienden que procesar correctamente la información relativa al sistema vial implica poder controlar de forma efectiva un vehículo.
Modelos cognitivos
Se trata de un modelo que pone el foco en la atención, el cual distingue entre un nivel automático de la atención (tareas rutinarias o muy entrenadas) y un nivel controlado de la atención (en este nivel se ejecutan las tareas nuevas o difíciles desde una atención consciente) que se combinan en la conducción, en función de las tareas que ejecute el conductor en un momento concreto.
Dentro de este modelo cognitivo se enmarca el modelo de queso suizo o de falla simultánia de Reason (1990,2000) para estudiar el error humano. Se trata de un modelo que parte de un enfoque sistémico para entender los errores humanos en un entorno organizado: los efectos negativos de una acción pueden prevenirse mediante sucesivas barreras o defensas que Reason representa como lonchas de queso. En esta representación Reason distingue entre:
- fallas latentes: decisiones erróneas, deficiencias en la línea de mando y precursores psicológicos de fallos inseguros
- fallas activas: actos inseguros y defensas inadecuadas
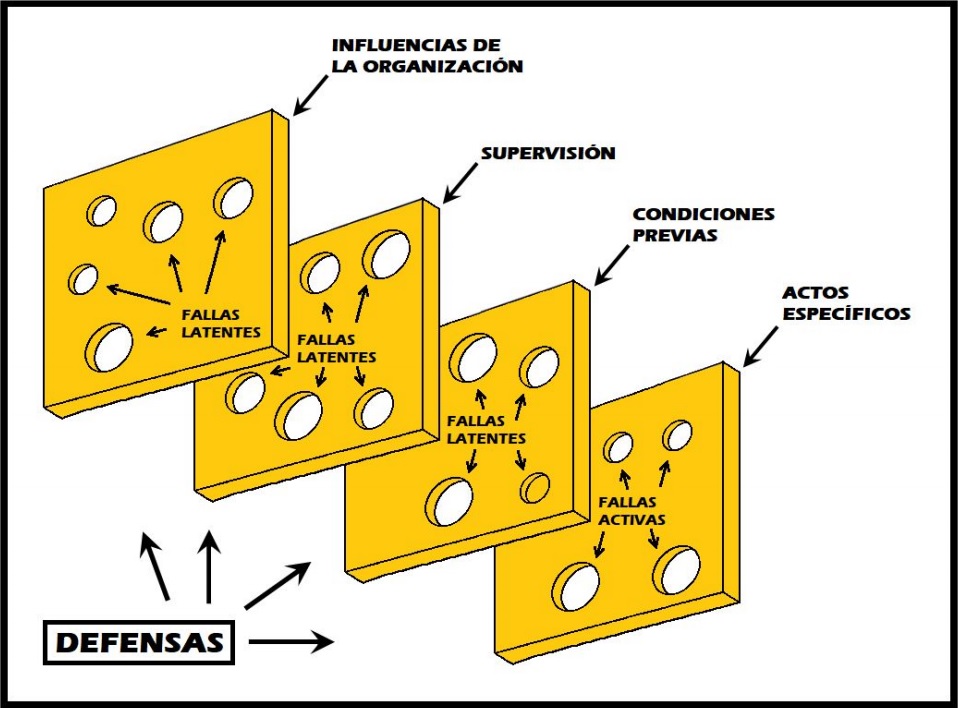
Para que el siniestro se produzca es necesario que exista una coincidencia espaciotemporal entre las fallas latentes y las activas, lo que se ilustra con el alineamiento de los agujeros del queso. Este modelo prevención pasa por eliminar o minimizar las condiciones latentes mediante el diseño de sistemas que compensen las fallas humanas, visibilicen los errores para poder intervenir sobre ellos o los minimicen mediante el diseño de medidas para tal fin. La aportación más relevante de Reason es poner el foco del error humano en las fallas latentes, entendiendo que las activas son consecuencias (y no causas) que no es posible eliminar.
Modelos motivacionales
Se trata de modelos que ponen el foco en el aspecto motivacional del concepto de riesgo y parten de la base de que las creencias, expectativas y anticipaciones que los individuos tienen respecto a los eventos futuros son un determinante fundamental de su conducta. Por lo tanto, defienden que, para incrementar la eficacia de las medidas preventivas a adoptar, estas deben poner el foco en los aspectos motivacionales de los conductores.
Uno de estos modelos sería el modelo de Amenaza-Evitación de Fuller (1986), el cual considera que la actividad de conducción implica el aprendizaje de respuestas de evitación frente a estímulos amenazantes. Esta fórmula podemos denominarla como el ABC del conductor (Antecedents-Behaviour-Consequences).
Otro modelo motivacional relevante es el de la teoría homeostática de compensación del riesgo de Wilde (1988), que sitúa en el centro la variable “estimación del riesgo de sufrir un accidente” que el usuario está dispuesto a asumir. Para Wilde, los conductores asumen un determinado nivel de riesgo (riesgo subjetivo) en base al cual ajustan su comportamiento, para que el riesgo percibido en cada momento coincida con el riesgo que están dispuestos a aceptar (riesgo tolerado).
El nivel de riesgo subjetivo que el conductor estima como óptimo se construye restando a los beneficios que espera obtener los costes anticipados respecto a su forma de movilidad. Quienes conducen seleccionan en sus elecciones la alternativa que estima producirá la mayor utilidad neta. Los conductores son maximizadores de la utilidad y, por tanto, optimizadores -no minimizadores- del riesgo de accidente o de seguridad.
Dentro de esta homeostasis (autorregulación de las conductas para mantener constante el nivel de riesgo tolerado), un aumento de la seguridad en el contexto de la conducción no derivará necesariamente en una mejora de la seguridad vial: para que esta mejore será necesario modificar y disminuir el nivel de riesgo tolerado elegido por la población.
Modelos sistémicos
El enfoque sistémico es una metadisciplina cuyo marco conceptual puede aplicarse a cualquier otra disciplina que, grosso modo, parte del supuesto que la totalidad posee propiedades que no podemos encontrar en ninguna de las partes componentes.
En el ámbito de la seguridad vial los modelos que parten de esta concepción defienden que los siniestros viales surgen de la confluencia de múltiples factores cuya causa hemos de buscar en el sistema entendido como un todo, que no puede analizarse estudiando las partes por separado. Ya no estamos ante una cadena lineal de sucesos como en los modelos anteriores, sino ante una causalidad circular compleja e interconectada. Para este modelo, los siniestros se producen cuando el sistema no puede cumplir los requisitos impuestos por su ambiente.
Numerosos modelos de prevención para la seguridad vial aplicados en Europa se enmarcan en este enfoque sistémico, como por ejemplo la Vision Zero de Suecia, el Start-Up de Holanda o el Tomorrow’s Roads Safer For Everyone de Reino Unido.
Uno de los métodos de análisis más conocidos que parte de este modelo es el Método DREAM 3.0 (Método de Análisis del Error y la Adaptabilidad del Conductor), utilizado inicialmente por la Administración Sueca de Carreteras para el análisis de las causas de los siniestros viales. Este método (WALLEN EARNET, H. et al., 2008) considera que la conducción es una tarea de control con múltiples niveles, que implica adaptarse continuamente a un medioambiente cambiante para alcanzar los objetivos propuestos, habitualmente con éxito. Partiendo de información directa sobre los siniestros, permite clasificar de manera sistemática varias de las causas asociadas organizando y categorizando los factores contribuyentes en fenotipos (efectos observables en acciones humanas y eventos del sistema) y genotipos (posibles factores contribuyentes de los fenotipos, organizados en la triada factor humano-tecnología-organización).
Para empezar el análisis se parte siempre de una causa directa (fenotipo) que ha de permitir involucrar las causas desencadenantes asociadas mediante un análisis multinivel que pone en relación las causas identificadas del siniestro con las ofrecidas por el método.
Modelos predictivos
Se trata de modelos que parten de analizar qué ocurrió en el pasado para predecir qué sucederá en el futuro. No son modelos que tengan como objetivo identificar causas concretas, sino localizar variables y factores de riesgo relacionados con la siniestralidad en contextos temporales, geográficos y sociales acotados, lo cual permite trazar estrategias de intervención.
Son modelos que se sirven de métodos econométricos, que permite constatar que algunos fenómenos objetivamente aleatorios se comportan con una regularidad estable, como si obedeciesen a una ley física. Esto ha permitido aplicar los modelos probabilísticos de regresión propios de la economoetría al análisis de la siniestralidad vial. Es una familia de modelos que suele servirse de las estadísticas y es aplicable al estudio de contextos amplios para detectar tendencias.
Conclusiones
Como se puede intuir a lo largo de este post, la utilidad de cada uno de los modelos existentes en materia de seguridad vial dependerá del ámbito en el que se aplique y de la finalidad que se persiga. Así, como peritos reconstructores en accidentes de tráfico, nosotros ponemos el foco en los modelos secuenciales, si bien pensamos que los epidemiológicos y los sistémicos son los más adecuados para aplicar por las administraciones a la hora de desarrollar estrategias que reduzcan la sinestralidad vial; mientras que los predictivos son utilísimos para detectar tendencias concretas y medidas específicas en contextos determinados.
Referencias bibliográficas
CAMPÓN DOMINGUEZ, José Andrés. El modelo secuencial de eventos de un siniestro MOSES. (2009: DIRAT). Disponible on line: https://www.researchgate.net/publication/240359048_El_Modelo_Secuencial_de_Eventos_de_un_Siniestro_MOSES
CAMPÓN DOMINGUEZ, José Andrés. El diseño de una base de datos de investigaciones en profundidad s-obre atropellos a peatones. (2015, Departament de Ingeniería Mecánica Ubniversidad Carlos III de Madrid). Disponible online en:
FULLER, R. (1984): A conceptualization of driving behavior as threat avoidance. Ergonomics,27 , 1139-1155.
FULLER, R. (1986). Reflections on risk homeostasis theory. En B. Brehmer, H. Jungerman, P. Lourens y G. Sevon (Eds.), New directions in research on decision making. Amsterdam: Elsevier.
FULLER, R. (1988): On learning to make risk decisions. Ergonomics,31, 519-526
HADDON, W. J., 1968. The changing approach to the epidemiology, prevention, and amelioration of trauma: the transition to approaches etiologically rather than descriptively based. American Journal of Public Health, 58(8), pp. 1431-1438
HADDON, W. J., 1973. Energy damage and the 10 countermeasure strategies. Journal of Trauma, Issue 13, pp. 321-331.
HADDON, W. J., 1983. Approaches to Prevention of Injuries. Miami, American Medical Association Conference on Prevention of Disabling Injuries.
PAULETTE, Lauro. Cómo entender la Seguridad Vial en nuestro tiempo: la caída de los Paradigmas y los desafíos de futuro. (2010, UNASEV). Disponible online en: http://www.medfamco.fmed.edu.uy/Archivos/unasev/bibliograf%C3%ADa/V/paradigmas%20de%20la%20seguridad%20vial_paulette_vCongreso.pdf
Reason, J., 2000. Human error: models and management. British Medical Journal, 320(7237)
REASON, J. H. E. P. J., 2006. Revisiting the «Swiss cheese» model of accidents. Journal of Clinical Engineering, Issue 27, pp. 110-115..
RUNYAN, C. W., 2003. Introduction: Back to the Future—Revisiting Haddon’s Conceptualization of Injury Epidemiology and Prevention. Epidemiologic Reviews, Volumen 25, pp. 60-65.
SÁNCHEZ FERREIRA, Emilio. Hacia un análisis sociológico de la siniestrabilidad vial (Universidad de A Coruña, 2012). Disponible online en: file:///C:/Users/ainho/Downloads/Hacia_un_analisis_sociologico_de_la_siniestrabilid.pdf
TABASSO CAMMI, Carlos. Paradigmas, teorías y modelos de la seguridad y la inseguridad vial. Disponible online en: http://94.23.80.242/~aec/ivia/tabasso_124.pdf
WALLEN EARNET, H. et al. (2008). Manual for DREAM 3.0, Driving Reliability and Error Analysis Method.
WILDE, G.J.S. (1988). Risk homeostasis theory and traffic accidents: propositions, deductions, and discussion of dissension in recent reactions. Ergonomics, 31 (4), 441-468.
______________________________________________
[1] Aviso sobre la terminología utilizada en este artículo: aunque consideramos que el término deontológicamente correcto es siniestro vial y no accidente de tráfico, por la aleatoriedad implícita en el término accidente, utilizaremos en este artículo indistintamente ambas expresiones. El motivo es que somos conscientes de que muchos de nuestros lectores todavía utilizan la expresión “accidentes de tráfico” y honestamente reconocemos que también necesitamos ser encontrados por ellos.